3d大數(shù)據(jù)分析預(yù)測軟件(預(yù)測準(zhǔn)確100%免費)
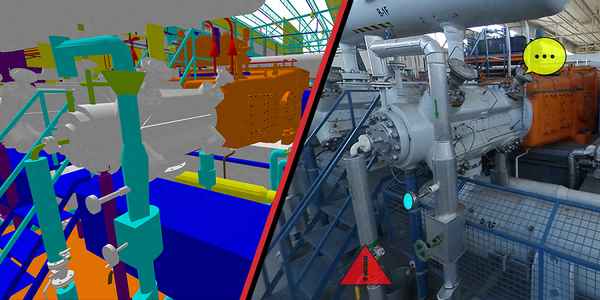
數(shù)字孿生(Digital Twin)是物理對象、流程或系統(tǒng)的虛擬復(fù)制品,用于監(jiān)控、分析和優(yōu)化現(xiàn)實世界的對應(yīng)物。 這些數(shù)字孿生在制造、工程和城市規(guī)劃等領(lǐng)域變得越來越重要,因為它們使我們能夠在現(xiàn)實世界中實施改變之前模擬和測試不同的場景。 數(shù)字孿生的一個關(guān)鍵組成部分是 3D 場景的使用,它提供了所建模的物理環(huán)境的真實且身臨其境的表示。
推薦:用 NSDT編輯器 快速搭建可編程3D場景
3D 場景對于數(shù)字孿生至關(guān)重要,因為它們使我們能夠創(chuàng)建準(zhǔn)確反映現(xiàn)實世界的虛擬環(huán)境。 這不僅包括物體和結(jié)構(gòu)的物理幾何形狀,還包括它們的紋理、顏色、照明和其他視覺屬性。 通過創(chuàng)建詳細(xì)的 3D 場景,我們可以模擬不同的場景并測試它們?nèi)绾斡绊懳锢憝h(huán)境,而無需進(jìn)行昂貴且耗時的現(xiàn)實測試。
除了提供逼真的視覺呈現(xiàn)之外,3D 場景還使我們能夠?qū)㈩~外的數(shù)據(jù)和信息合并到數(shù)字孿生中。 例如,我們可以使用傳感器和其他監(jiān)控設(shè)備來收集溫度、濕度或振動等因素的實時數(shù)據(jù),并將這些信息合并到 3D 場景中。 這使我們能夠創(chuàng)建一個動態(tài)的交互式虛擬環(huán)境,可以實時監(jiān)控和優(yōu)化現(xiàn)實世界的流程。
3D 場景是數(shù)字孿生的關(guān)鍵組成部分,因為它們提供了所建模的物理環(huán)境的真實且身臨其境的表示,同時還能夠合并其他數(shù)據(jù)和信息。 隨著數(shù)字孿生不斷發(fā)展并變得更加復(fù)雜,3D 場景的重要性只會繼續(xù)增長,因為它們使我們能夠創(chuàng)建更準(zhǔn)確、更有效的現(xiàn)實世界虛擬復(fù)制品。
數(shù)字孿生的創(chuàng)建在很大程度上依賴于準(zhǔn)確 3D 數(shù)據(jù)的可用性,這些數(shù)據(jù)可以創(chuàng)建物理對象、流程或系統(tǒng)的虛擬模型。 收集 3D 數(shù)據(jù)的方法有多種,每種方法都有其自身的優(yōu)點和局限性。 以下是一些最常用的方法:
- 激光掃描
激光掃描涉及使用激光掃描儀捕獲 3D 空間中數(shù)百萬個單獨的點,然后將這些點組合起來創(chuàng)建詳細(xì)的 3D 模型。 該方法對于捕獲復(fù)雜的幾何形狀(例如建筑物或機械)非常有用,并且可以快速準(zhǔn)確地完成。
- 攝影測量
攝影測量涉及從不同角度拍攝物體或環(huán)境的多張照片,然后使用專門的軟件將它們拼接成 3D 模型。 這種方法相對便宜,可以使用消費級相機甚至智能手機來完成,但需要仔細(xì)規(guī)劃,并且可能受到照明和圖像質(zhì)量等因素的影響。
- 結(jié)構(gòu)光掃描
結(jié)構(gòu)光掃描涉及將光圖案投射到物體或環(huán)境上,然后使用相機捕獲由物體表面引起的圖案失真。 此方法快速且準(zhǔn)確,但需要專門的設(shè)備,并且可能會受到環(huán)境照明條件的影響。
- 飛行時間 (ToF) 掃描
ToF 掃描涉及使用紅外傳感器來測量光從物體或環(huán)境反射回來所需的時間,然后使用該數(shù)據(jù)創(chuàng)建 3D 模型。 該方法快速且準(zhǔn)確,但會受到環(huán)境光和反射表面等因素的影響。
- 激光雷達(dá)(光探測和測距)
激光雷達(dá)是一種利用激光測量物體或環(huán)境距離的遙感方法。 這種方法通常用于航空測量,但也可用于地面測繪。 激光雷達(dá)對于快速準(zhǔn)確地捕獲大面積區(qū)域非常有用,但需要專門的設(shè)備并且價格昂貴。
收集用于生成數(shù)字孿生的 3D 數(shù)據(jù)的方法的選擇取決于項目的具體要求,包括準(zhǔn)確性、速度、成本以及所建模對象或環(huán)境的復(fù)雜性等因素。 通過精心挑選最合適的方法并將其與先進(jìn)的軟件和可視化工具相結(jié)合,可以創(chuàng)建高度準(zhǔn)確且有效的數(shù)字孿生,從而優(yōu)化現(xiàn)實世界的流程和系統(tǒng)。
如果你采集的3D數(shù)據(jù)格式和數(shù)字孿生引擎要求的格式不一致,可以使用NSDT 3DConvert將其轉(zhuǎn)換為要求的格式,例如GLTF、OBJ、PLY等:
https://3dconvert.nsdt.cloud
分析 3D 內(nèi)容是創(chuàng)建和維護(hù)數(shù)字孿生的關(guān)鍵步驟,因為它使我們能夠從虛擬模型中提取有用的見解和信息。 以下是分析數(shù)字孿生 3D 內(nèi)容所涉及的一些關(guān)鍵步驟:
- 數(shù)據(jù)準(zhǔn)備
在開始分析之前,必須準(zhǔn)備好要處理的 3D 數(shù)據(jù)。 這可能涉及清理數(shù)據(jù)以消除任何錯誤或偽影,將數(shù)據(jù)與公共坐標(biāo)系對齊,以及將數(shù)據(jù)轉(zhuǎn)換為易于分析的格式。
- 特征提取
準(zhǔn)備好數(shù)據(jù)后,下一步就是提取適用于特定應(yīng)用程序或用例的特征。 這可能涉及識別和測量 3D 模型中物體或結(jié)構(gòu)的尺寸、形狀、方向或其他特征,或提取特定數(shù)據(jù)點,例如溫度或濕度讀數(shù)。
- 可視化
可視化是 3D 內(nèi)容分析的重要組成部分,因為它使我們能夠更好地理解數(shù)據(jù)并識別模式或異常。 這可能涉及創(chuàng)建數(shù)據(jù)的 2D 或 3D 可視化,或使用先進(jìn)的可視化技術(shù),例如虛擬現(xiàn)實或增強現(xiàn)實。
- 仿真和建模
仿真和建模可以預(yù)測所建模的物理系統(tǒng)的變化將如何影響其性能或行為。 這可能涉及使用計算流體動力學(xué) (CFD) 來模擬流體通過管道或其他結(jié)構(gòu)的流動,或使用有限元分析 (FEA) 來模擬機械系統(tǒng)在不同負(fù)載或應(yīng)力下的行為。
- 機器學(xué)習(xí)
機器學(xué)習(xí)技術(shù)可以分析 3D 內(nèi)容并識別人類分析師可能無法立即看出的模式或趨勢。 這可能涉及訓(xùn)練機器學(xué)習(xí)算法來識別 3D 模型中的特定對象或特征,或使用無監(jiān)督學(xué)習(xí)來識別數(shù)據(jù)中的相關(guān)性或聚類。
數(shù)字孿生的 3D 內(nèi)容分析需要結(jié)合技術(shù)專業(yè)知識、先進(jìn)的軟件和工具,以及對特定應(yīng)用或用例的深入理解。 通過仔細(xì)分析 3D 內(nèi)容,可以提取有價值的見解和信息,從而優(yōu)化現(xiàn)實世界的系統(tǒng)和流程,并最終提高性能和效率。
4、結(jié)束語
數(shù)字孿生是物理對象、系統(tǒng)或流程的虛擬副本,用于監(jiān)控、分析和優(yōu)化其性能。 它們很重要,因為它們提供了幾個關(guān)鍵優(yōu)勢,包括:
- 提高效率
數(shù)字孿生使我們能夠在問題成為重大問題之前識別并解決問題,從而減少停機時間并提高整體效率。
- 預(yù)測性維護(hù)
通過監(jiān)控物理系統(tǒng)的實時數(shù)據(jù),數(shù)字孿生可以預(yù)測何時需要維護(hù),從而減少昂貴且耗時的維修需求。
- 優(yōu)化
數(shù)字孿生優(yōu)化流程或系統(tǒng),使我們能夠發(fā)現(xiàn)改進(jìn)機會并提高績效。
- 節(jié)約成本
通過減少停機時間、預(yù)測維護(hù)需求和優(yōu)化性能,數(shù)字孿生可以幫助節(jié)省資金并提高利潤。
- 創(chuàng)新
數(shù)字孿生在我們在物理世界中實施新想法或設(shè)計之前對其進(jìn)行模擬和測試,從而可以在沒有失敗風(fēng)險的情況下進(jìn)行創(chuàng)新和實驗。
數(shù)字孿生很重要,因為它們提供了用于監(jiān)控、分析和優(yōu)化現(xiàn)實世界系統(tǒng)和流程的強大工具,使我們能夠提高效率、降低成本并推動創(chuàng)新。
原文鏈接:http://www.bimant.com/blog/3d-digital-twin/